














Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

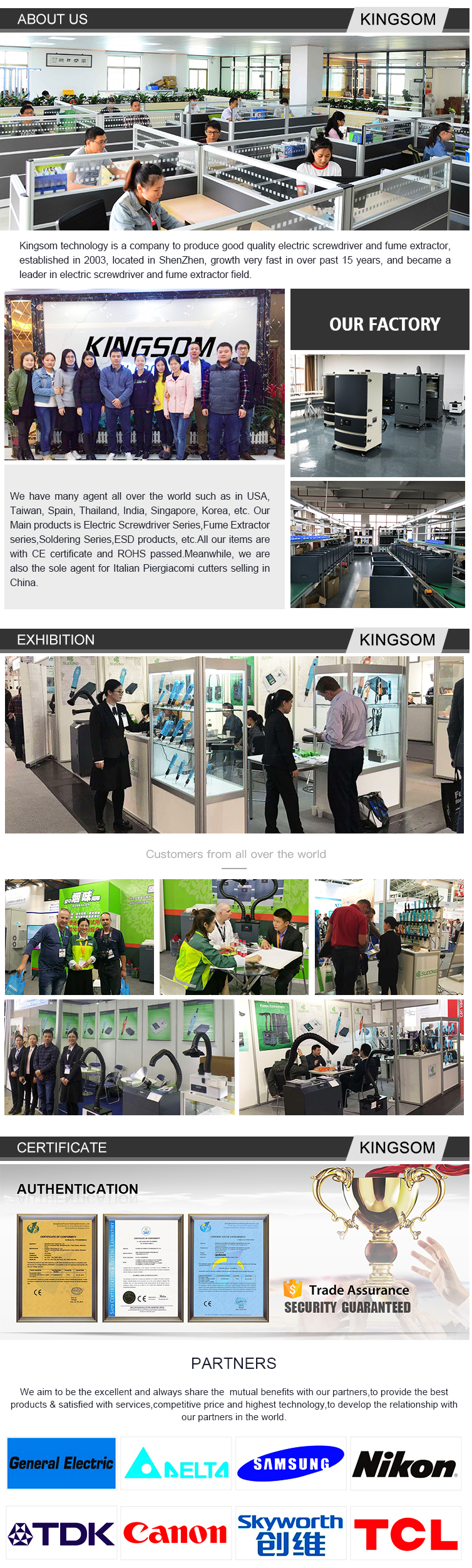
Shenzhen Kingsom Technology Co., Ltd.
марка: Kingsom
Подробности Упаковки: Картон деревянный
производительность: 10000sets/year
транспорт: Ocean
Место происхождения: Шэньчжэнь
Поддержка о: Strong
Сертификаты : CE,CCC,ROHS and ISO9001:2008
Порт: Shenzhen Port
Вид оплаты: L/C,T/T,Paypal,Western Union
Инкотермс: FOB,EXW
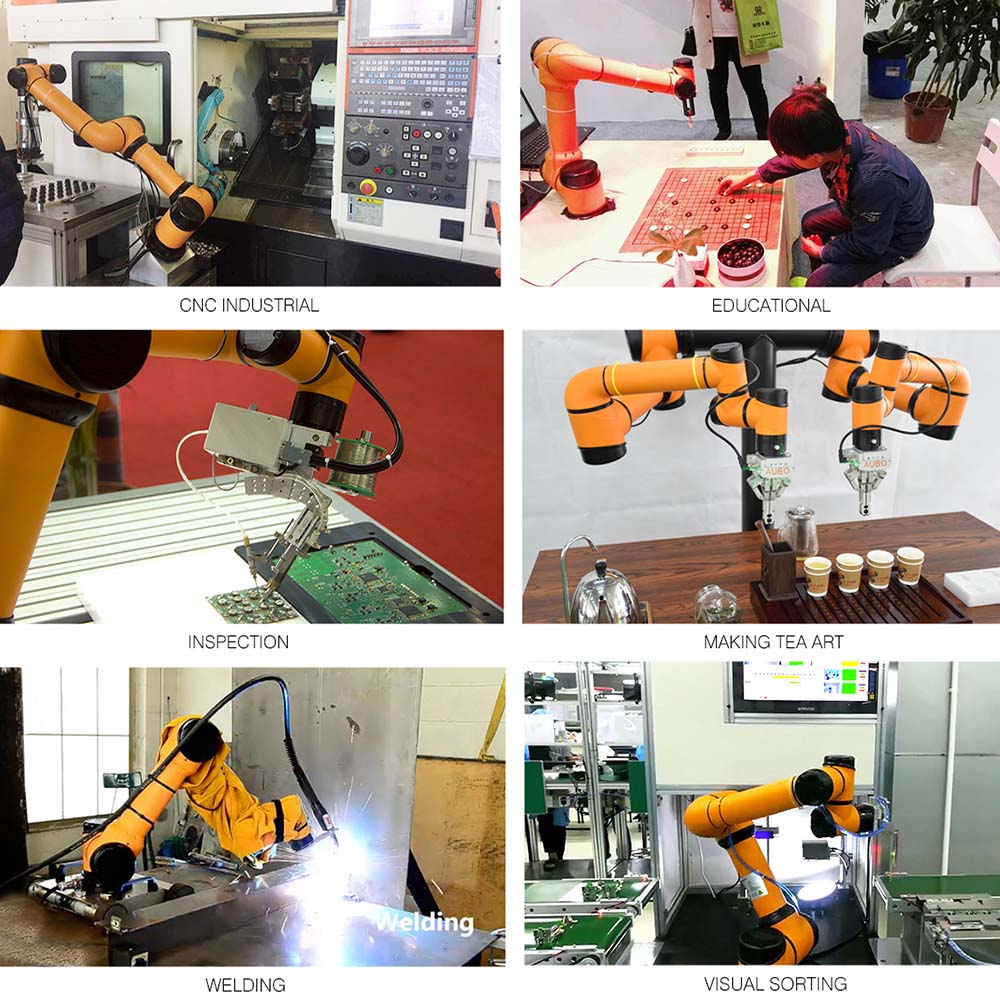
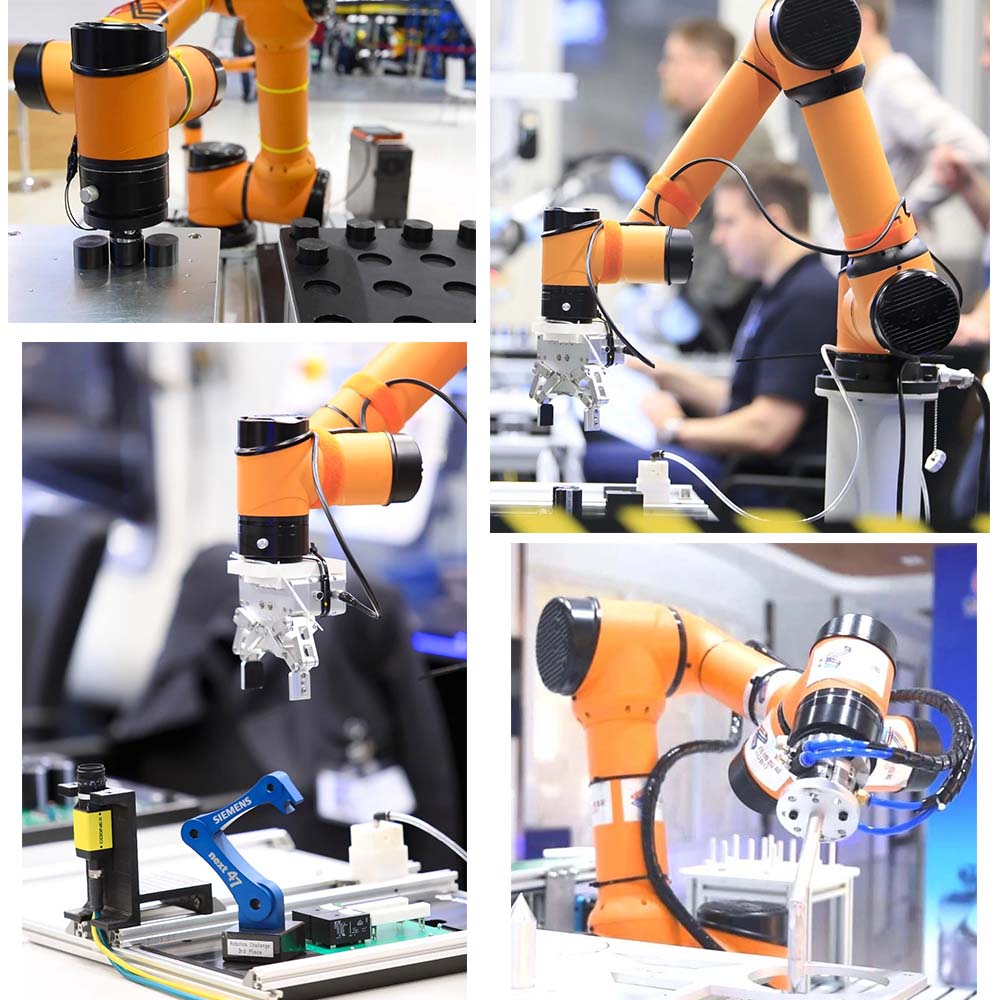
Kingsom Коллаборативный мобильный промышленный манипулятор
Ковочный манипулятор - это автоматическое устройство, которое имитирует часть движения руки человека и выполняет функции загрузки и разгрузки, передачи между станциями в соответствии с заданными процедурами, путями или другими требованиями. Использование манипуляторов в производстве может обеспечить качество продукции, повысить производительность труда, освободить рабочих от тяжелого и повторяющегося ручного труда и может заменить человеческие операции в особых условиях, таких как высокая температура, высокое давление, низкая температура и пыль.
Совместная функция : руководство по обучению (планирование движения с обратной кинематикой), это ручное управление роботом позволяет быстро и легко запрограммировать робота путем демонстрации без каких-либо навыков программирования. Работает бок о бок с человеком-оператором без защитного ограждения, лазера и датчиков (после проведения оценки рисков). Обучающий пользовательский интерфейс для программирования (прямая кинематика) позволяет онлайн-программированию и моделированию с помощью планшета с сенсорным экраном. Легкий, гибкий, простой в использовании, этот робот весит менее 24 кг.
Функции безопасности : Разработаны в соответствии с требованиями безопасности PLd и ISO 10218-1 (5.10.5 ограничение мощности и усилия) и соответствуют большинству всех спецификаций для совместной работы роботов. Конструкция с ограничением мощности и усилия обеспечивает защитную остановку робота в случае превышения пределов или обнаружения столкновения. Скорость и усилие можно легко настроить и оптимизировать для любого приложения. Датчики, встроенные в моторные приводы, обеспечивают обратную связь в реальном времени для предотвращения опасных ситуаций. Кнопки аварийного останова расположены на консоли обучения и блоке управления с тормозным путем менее 1 мм.
Архитектура с открытым исходным кодом: сеть CAN-шины, используемая в этом роботе для взаимодействия нескольких микроконтроллеров друг с другом. ROS (операционная система роботов) поддерживается через API. Аппаратное обеспечение использует протоколы шины CAN с открытыми расширениями интерфейса ввода-вывода. Легко интегрируйте робота в существующие производственные системы.
Окупаемость инвестиций (ROI): низкая стоимость владения, отсутствие необходимости в навыках программирования и простота интеграции в систему - все это обеспечивает быструю окупаемость ваших инвестиций, средняя рентабельность инвестиций составляет от 3 до 4 месяцев. Краткосрочные и многофункциональные задачи, такие как автоматизация лабораторий или обслуживание оборудования, являются яркими примерами отраслей, нуждающихся в быстром передислокации. В большинстве компаний площадь пола стоит дороже, чем оборудование. Небольшой размер и легкий вес робота станут огромным преимуществом для компаний любого размера по стоимости производства. Перепрофилируйте, повторно развертывайте и / или изобретайте приложения с помощью одного и того же робота, меняйте количество степеней свободы, соединения и трубы имеют модульную структуру, что упрощает ремонт и реконфигурацию.
Интеллект
1. Системы технического зрения могут быть интегрированы в контроллер.
2. Программная система на основе управления облачной платформой, которая реализует удаленное обслуживание, диагностику неисправностей и онлайн-обновление прошивки.
3. Эта платформа исследовательского робота широко используется во всем мире в корпоративных исследовательских лабораториях и для научных исследований робототехники.
Модульная конструкция
1. Робот может иметь от четырех до семи степеней свободы в соответствии с требованиями пользователя.
2. Длина соединения может быть изменена на более длинные или короткие звенья.
Помимо роботов-манипуляторов, наша компания также предлагает множество продуктов, таких как экстрактор паяльного дыма, дозатор паяльной пасты, пневматический ручной шнековый питатель, автоматический шнековый питатель. Если вам нужны эти продукты, вы можете связаться с нами, мы ответим вам в ближайшее время.
Технические характеристики
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety monitored stop, speed and separation monitoring, hand guid operation, power and force limiting design. |
| Certifications |
ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 ISO 12100:2010, ISO 13849-1:2008, CE |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python. |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | User I/O | Safety I/O | |
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | - | |
| Communication | TCP/IP, Modbus-RTU/TCP | Analog out | 4 | - | |
| Power supply | 100-240 VAC, 50-60Hz | Power input | 24 Volts | ||
| IP Classification | IP54 | Power output | 3A | ||


Группа Продуктов : Робот-манипулятор > Kingsom Новое прибытие Промышленный ковочный манипулятор Robot Arm












Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.