Китай Kingsom Новое прибытие Промышленный ковочный манипулятор Robot Arm Поставщики
Ковочный манипулятор представляет собой автоматическое устройство управления, которое имитирует действия руки человека и работает в соответствии с заранее определенной программой. Его можно использовать для выполнения вспомогательных процедур в процессе ковки (таких как транспортировка, погрузка и разгрузка, хранение и т. Д.) И для операций ковки. Использование манипуляторов в производстве может обеспечить качество продукции, повысить производительность труда, освободить работников от тяжелого и повторяющегося ручного труда и может заменить людей в особых условиях, таких как высокая температура, высокое давление, низкая температура и пыль.
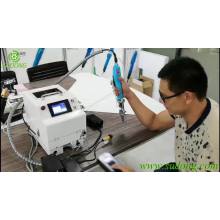
Использование различных типов манипуляторов и оборудования для кузнечного производства в сочетании с технологией электронного компьютерного управления может создать полностью автоматизированный цех кузнечного производства, что открывает новый путь для модернизации кузнечного производства.
Кузнечные манипуляторы являются только применением промышленных манипуляторов в кузнечном производстве. В дополнение к рассмотрению принципов общих манипуляторов, специальные требования для кузнечного производства также должны быть учтены в проекте [2].
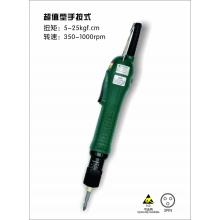
Кузнечный манипулятор состоит из трех частей: исполнительной системы, системы привода и системы управления.
Исполнительная система обычно состоит из рук, запястий, рук, тела и некоторых дополнительных механизмов ходьбы. Система привода состоит из элементов привода и трансмиссионных механизмов. Существует четыре широко используемых формы: гидравлическая, пневматическая, электронная и механическая. Система управления состоит из устройства управления и устройства обнаружения. Обычно используется электрическое управление, которое управляет движением манипулятора в соответствии с заданной программой и контролирует движение манипулятора при необходимости. Когда в действии возникает ошибка или неисправность, она может быть передана обратно в систему управления для регулировки или сигнала тревоги.